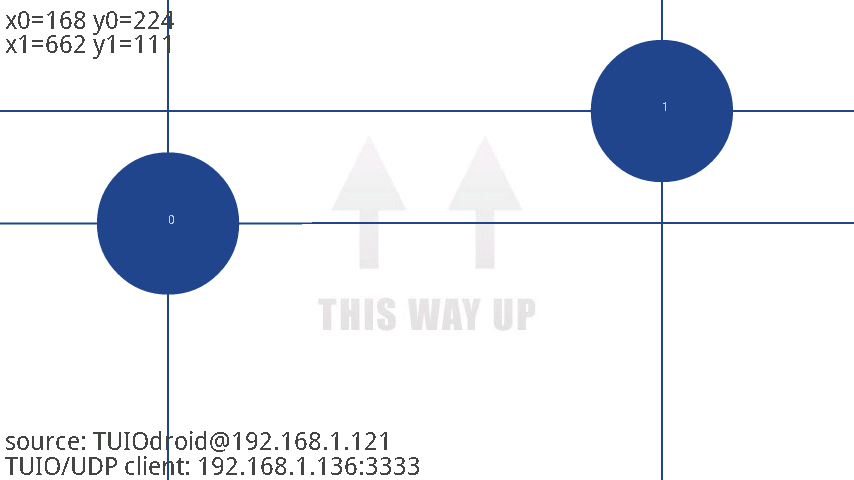
In this post we will begin to add TUIO (Tangible User Interface Object) support to our project by implementing a server module to parse OSC (Open Sound Control) packets for 2D cursor descriptions. This will allow us to import blob events from a client application. We will use the TUIOdroid application available for android devices …
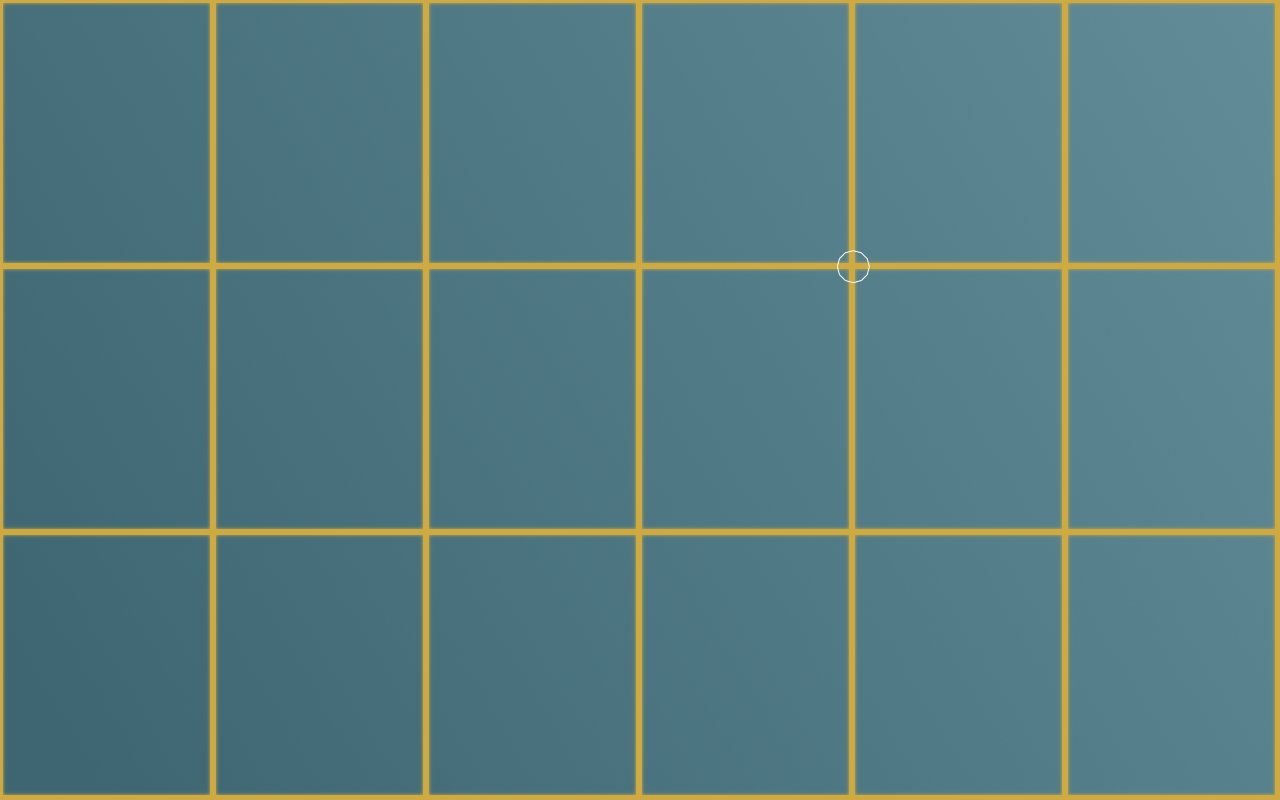
In this post we will touch upon the calibration component for multi-touch systems. By the end of this post we will implement a calibration widget that is integrated with our tracker modules, but before we do that we'll discuss the mathematics behind one method for mapping camera space to screen space. Below is a screen …

In the previous post we discussed the event queue and the abstract base class for the widgets. Now we will concentrate on creating some widgets that we can use by extending the base class, and we will look at setting up the queue, registering widgets, and calling the processEvents() method in our programs main loop. …
In my previous posts we've discussed blob extraction and tracking. Now we'll take it one step further and design an event system to handle those events and deliver them to registered widgets. In this post we will focus on the event system and the widget base class. In the next post we will extend the …
In the post before last we discussed using cvBlobsLib as a tool for blob extraction. We're going to revisit the extraction theme and look at a C++ implementation of the Connected Component Labeling method, but before we do that we're going to look at an implementation of the Disjoint Set data structure that will provide …

In my last post we discussed blob extraction and event tracking. We will continue with that project by adding support for two-dimensional fiducial tracking. We will attempt to implement the fiducial detection algorithm used on the Topolo Surface1. We will first describe the fiducials and how their properties are encoded in their structure, and we …
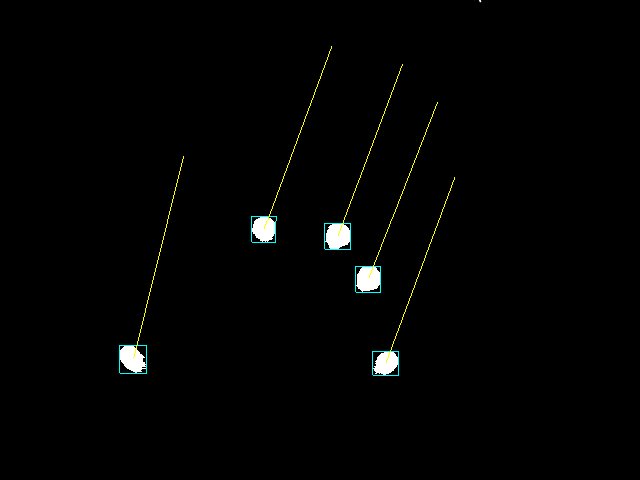
In my previous post we discussed using OpenCV to prepare images for blob detection. We will build upon that foundation by using cvBlobsLib to process our binary images for blobs. A C++ vector object will store our blobs, and the center points and axis-aligned bounding boxes will be computed for each element in this vector. …
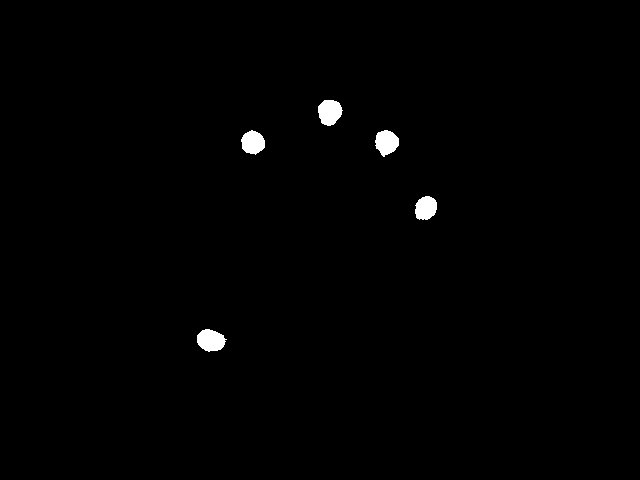
In this post I will discuss how you can capture and process images in preparation for blob detection. A future post will discuss the process of detecting and tracking blobs as well as fiducials, but here we are concerned with extracting clean binary images that will be passed to our detector module. We will use …